Lec1 overview of Computer Graphic
判断游戏画面水平如何
可以去看画面的明暗.亮的,一般都是采用了全局光照技术.从技术层面来看更加优秀
特效是最简单的图形学技术应用
特效是特殊的效果.在平常生活中见得很少,即使特效出错,观众不一定看得出来.而对日常东西的渲染更为困难
Visualization
Virtual Reality
Digital Illustration数字图像处理
Simulation
Graphic User Interface
Typography矢量字体?
course topic
- Rasterazation
- Curves and Meshes
- Ray Tracing
- Animation / Simulation
CG与CV
一切需要理解,猜测的都是计算机视觉的内容.
no clear boundaries
Lec2 Review of Linear Algebra
A Swift and Brutal Introduction to Linear Algebra
Vectors
或者
dot product 点乘
for unit Vectors
符合
- 交换律
- 结合律
- 分配律
用矩阵表达的点乘计算更加简单直接
在二维
同理对于三维
主要是用来寻找投影
对于在上的投影
若为,则
用处:
观察点乘结果判断
- 两个向量是否接近
- 两个向量的前后位置关系

cross product
方向上采用右手定则
没有交换律但符合分配律和结合律
是向量,不是单纯的

作用:
通过
叉乘结果判断
- 左和右
if()
then,在左侧
if()
then,在右侧
- 内和外
利用左右判断
if()
then,p在内侧

在3D情况下寻找投影
类似于二维的情况

若
则
matrix
矩阵的乘法
不符合交换律但符合结合律和分配律
将向量vector视作列向量m*1的矩阵
矩阵的转置
单位矩阵
对于逆运算
将点乘与叉乘转换为矩阵乘法

- transformation
- modeling
- rotation
- scaling
- viewing
- projection
homogeneous coordinate 齐次坐标
为解决Translation问题,齐次坐标堂堂登场
或者换一个角度看
增加的储存数据只有最后一列的与最后一行的,而且在大部分情况下,只要储存一个1就够了.性能开销不大的情况下实现了相当好的效果
modeling
先线性变换再平移
线性变换
除了平移之外都是线性变换?
都可以用一个统一的矩阵来表示
scale

缩放矩阵,缩放系数为
reflection

sheer 拉伸


rotate

写出正确的旋转矩阵,只需要找到前后变化的点的相对位置关系
推导的值,可以由特殊到一般,
带入推导随便算
对于旋转来说
存在下列关系:
可以用转置简单求得
线性变换的齐次坐标表示

非线性变换
Translation 平移变换

平移不是一个线性变换
为了避免这样的情况
引入了齐次坐标来解决
在齐次坐标下平移的表示
仿射变换:线性变换再接上平移
对于这样的操作来说,无法简单的写成与上方统一的矩阵相乘的形式
只能写成
但通过齐次坐标
可以写成
矩阵乘法的顺序会影响结果
所以变换顺序的不同也会影响结果
默认情况下先做旋转再做平移
对于下式来说
先做旋转再做平移
对于一系列操作来说
可以先合成之前的矩阵,最终变成
能够表达无数多的复杂变换
非原点旋转
顺序是从左到右
先平移到原点,再旋转,最后再平移回去
使用逆矩阵就可以完成逆变换

How to get a photo?
- 摆pose modeling transformation
- 选相机位置 viewing transformation
- 按快门 projection transformation
MVP!
modeling viewing projection
三维下的模型变换
平移仍然在最后一列
scale
reflection
Translation
sheer
Rotate
- 沿着y轴旋转
是最特殊的一个,右上角是
下见推算过程
对于任意的3D旋转来说,可以分解为一个在3D直角坐标系中的
三个绕各个轴旋转的矩阵相乘
叫做欧拉角(Euler Angles)
战地中的开飞机也是这样
- Rodrigues’ Rotation Formula
rotation by angle around axis
这部分是叉乘的矩阵表达形式
viewing/camera 视图变换
基础:
相机的位置 人的位置
相机看向的方向 眼睛朝向
相机顶部向量 脑袋歪斜方向

在物理学的角度,可以将物体的移动看成,相机位置不动,其他物体相对运动.
于是把相机固定在标准位置,
即
相机位于原点,永远看向-z轴,顶部指向y轴正方向
即
让操作计简化
标准化流程

- 将后面几步旋转矩阵计算为同一个矩阵可得逆矩阵.由于矩阵计算困难,故使用逆矩阵

第一行为(g x t) To X 结果
第二行为t To Y的结果
第三行为g To -Z的结果
projection 投影变换
- orthographic projection 正交投影
- perspective projection 透视投影
orthographic projection 正交投影

把z轴直接去掉,再进行平移与缩放到范围内,就可以得到正交投影的结果
工程上的做法
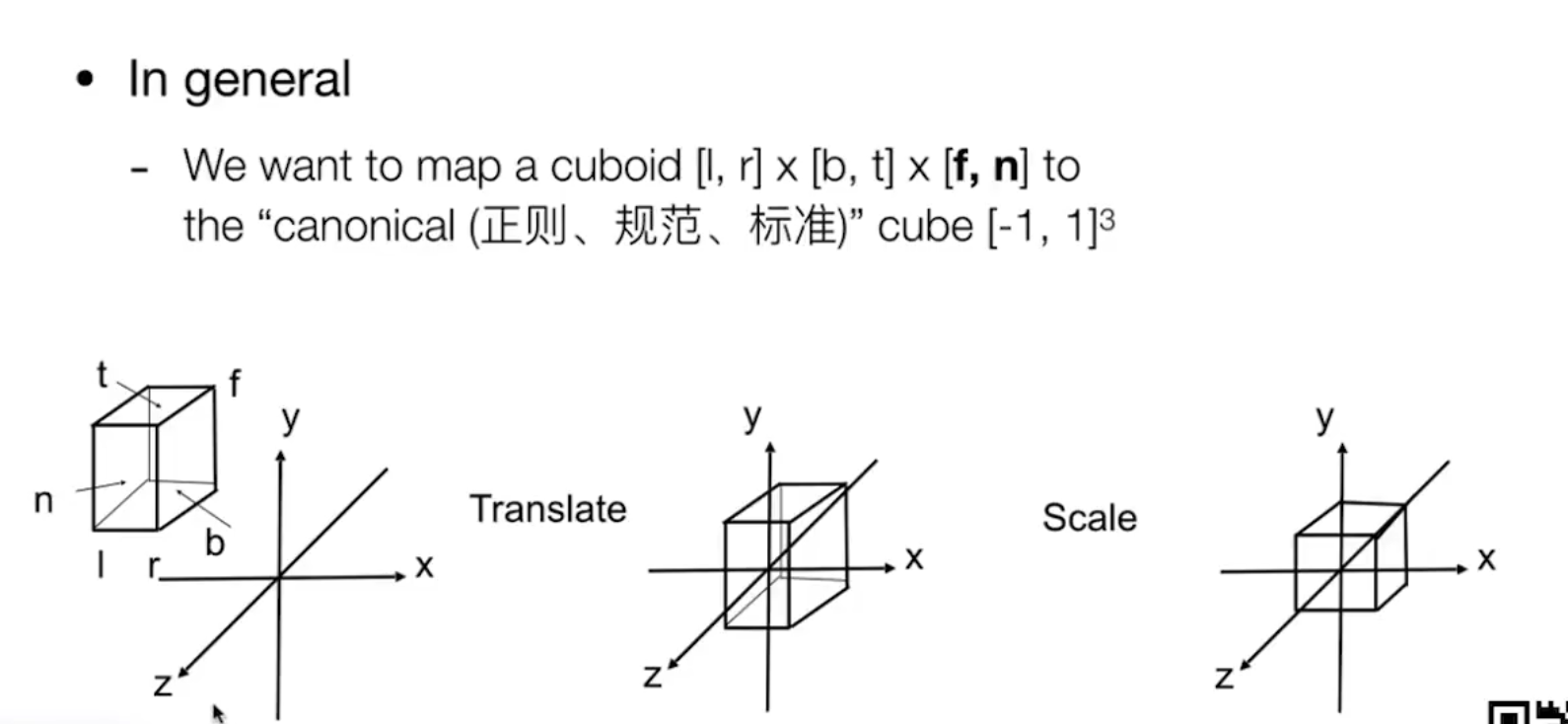
注意,
- 左右的范围为[l,r],left<right
- 上下的范围为[b,t],bottom<top
- 前后的范围为[f,n],far<near.因为我们看向的方向是-z,例如f=-9,n=1.
变换矩阵为
前一个为了缩放立方体到范围
后一个为了平移立方体中点至原点
但现在并没有完全完成变换,因为缩放的过程中存在拉伸,还需要后续的视口变换来矫正
也存在精度上的问题.把大的立方体缩放到小立方体,会导致信息损失
- 视锥如何定义?

定义一个fov-Y(垂直可视角度),再定义一个aspect ratio(宽高比),就可以确定视锥的形状
其他的数据都可以简单计算出来等等

将从视锥通过投影面截出来的截锥体挤压成cuboid,再进行正交投影,就可以得到透视投影
只要求得就行力

显而易见
但仍然不清楚
得到
可推算得
而根据定义,近平面,z不变可知
将带入
得
\begin{pmatrix}
0&0&A&B
\end{pmatrix}
\begin{pmatrix}
x \ y \ f \ 1
\end{pmatrix}=f^{2}
\begin{align}A=n+f \ B=-nf\end{align}
M_{persp\rightarrow ortho}=\begin{pmatrix}
n&0&0&0 \ 0&n&0&0 \ 0&0&n+f&-nf \ 0&0&1&0
\end{pmatrix}
\begin{align}
M_{persp\rightarrow ortho}\begin{pmatrix}
x \ y \ \frac{n+f}{2} \ 1 \
\end{pmatrix}=\begin{pmatrix}
n&0&0&0 \ 0&n&0&0 \ 0&0&n+f&-nf \ 0&0&1&0
\end{pmatrix}
\begin{pmatrix}
x \ y \ \frac{n+f}{2} \ 1 \
\end{pmatrix}=\begin{pmatrix}
nx \ ny \ \frac{n^{2}+f^{2}}{2} \ \frac{n+f}{2}
\end{pmatrix}=\begin{pmatrix}
\frac{2n}{n+f}x \ \frac{2n}{n+f}y \ \frac{n^{2}+f^{2}}{n+f} \ 1
\end{pmatrix}
\end{align}
M_{viewport}=
\begin{pmatrix}
\frac{width}{2}&0&0&\frac{width}{2} \ 0&\frac{height}{2}&0&\frac{height }{2} \ 0&0&1&0 \ 0&0&0&1
\end{pmatrix}
\begin{align*}
4\pi1^{2}I&=4\pi r^{2}I^\prime\
I^{\prime}&=\frac{1}{r^{2}}
\end{align*}
N_{v}={\frac{\sum_{i}N_{i}}{|\sum_{i}N_{i}|}}
\begin{align}
&(x,y)=\alpha A+\beta Y+ \gamma C\
&\alpha + \beta +\gamma=1
\end{align}
V=\alpha V_{a}+\beta V_{b}+\gamma V_{c}
\begin{align}
lerp(x,v_{0},v_{1})&=v_{0}+x(v_{1}-v_{0})\
x&\in(0,1)
\end{align}
\begin{align}
u_{0}&=lerp(s,u_{00},u_{10})\
u_{1}&=lerp(s,u_{01},u_{11})\
\end{align}
f(x,y)=lerp(t,u_{0},u_{1})
1^{2}+2^{2}+ \ldots+(\frac{n}{2})^{2}+n^{2}=\frac{4}{3}n^{2}
\begin{align}
b^{n}(t)&=b_{0}^{n}(t)=\sum^{n}{j=0}b{j}B_{j}^{n}(t)\
B_{i}^{n}(t)&=\ {\binom{n}{i}}t^{i}(1-t)^{n-i}
\end{align}
\min(\sum_{i=1}^{n}distance^{2})
r(t)=o+td,0\leq t <\infty
p:(p-p^{\prime})\cdot{N}=0
\begin{align}
t_{enter}=max(t_{min})\
t_{exit}=min(t_{min})
\end{align}
\begin{align}
&x\
&\dot{x}=v\
&\ddot{x}=a\
\end{align}